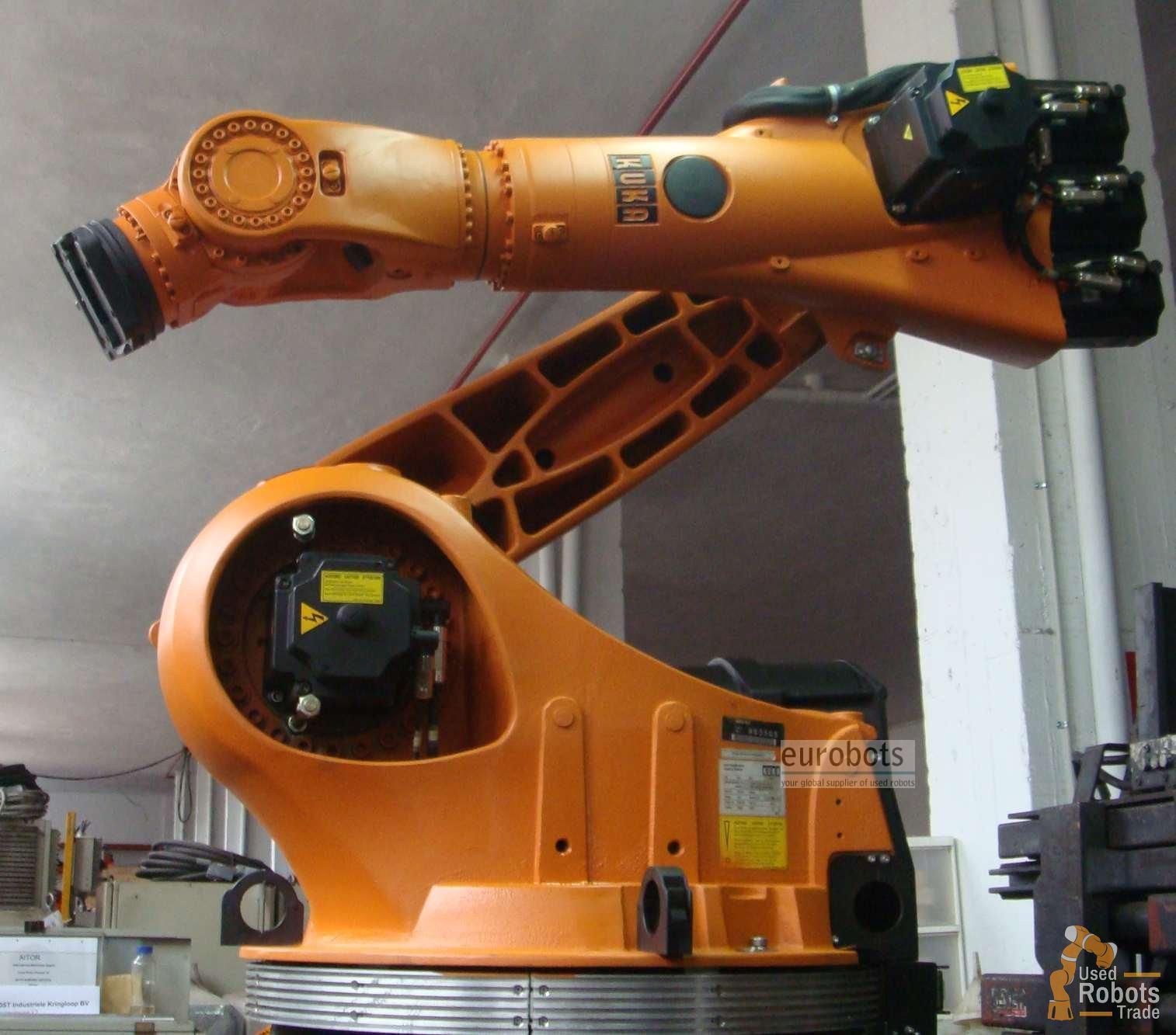
KUKA KR210 VKRC2 control
Dettagli robot
Anni 2001-2002. Circa 8000-10000 ore di lavoro. Robot ad alto carico utile per uso generale. Questo robot è essenzialmente lo stesso della serie KR210 2000 con controller standard KRC2. La differenza sta nel controller che contiene una versione del software Kuka 3.3.4 progettata per il gruppo VW. L'hardware del quadro di controllo è quasi identico e la filosofia e l'ambiente di programmazione funzionano allo stesso modo.
Differenze tra la programmazione di KRC2 e VKRC2
Sistema di controllo "KRC2 standard"
La caratteristica principale è che l'intero sistema è aperto fin dall'inizio, possiamo gestire le opzioni di programmazione aperte a qualsiasi programmatore su due livelli:
Nome utente:
Livello di programmazione predefinito che ci consente di calcolare gli strumenti e le basi di lavoro caricati sia come calibrazione esterna del robot, sviluppare programmi, modificare, duplicare, cancellare, ecc ..
Anche su questo livello è possibile modificare le variabili definite nel programma e visualizzare gli input di abilitazione dell'output.
Esperto:
Questo livello è definito come avanzato, tutte le opzioni sono aperte al programmatore, in questo caso viene esclusa la creazione di programmi, in alternativa è possibile modificare i programmi progettati per introdurre i codici del programma.
È a questo livello in cui i driver sono configurati anche per la comunicazione con la periferia.
Tutti i programmi creati con questo sistema, i nomi sono realizzati con lo sviluppatore ritenuto appropriato per ogni ruolo da eseguire
"Grab_part", "lift_fixer" ecc ...
La gestione dei programmi "mainstream" può essere effettuata tramite il programma "Cell" collegato a una linea PLC e tutti i programmi possono essere collegati tra loro.
Sistema di controllo "VKRC2 VW"
Questo sistema è impostato con Volkswagen per il lavoro automobilistico.
La caratteristica principale è la facilità di programmazione e la diagnosi rapida del sistema.
Nel sistema le modalità VKRC2 sono anche utente ed esperto, ma qui tutto può essere fatto dal livello utente. L'accesso a livello di esperti avviene con una chiave.
La programmazione è fatta in meno tempo perché la caratteristica principale dell'introduzione del codice, questo è fatto con diverse opzioni che appaiono sui tasti a seconda delle opzioni che abbiamo, in breve, nessun male può entrare nel codice di programmazione. Ovviamente, il sistema non ti dice se aggiungiamo le istruzioni appropriate.
Esempio: (OUT "56" TRUE), quando forse sarebbe necessario in quel momento (OUT "56" FALSE)
Programmi che possono essere utilizzati con questo sistema e hanno una struttura definita.
Folge : questi programmi sono gestiti attraverso l'automazione esterna e possono essere chiamati solo da un automa.
Su : Sub con movimento che può essere chiamato solo da uno o un altro Up Folge
Makro : Sub nessun movimento che può essere chiamato da un Folge, un Up o altro Makro.
Con questo sistema, perdiamo la capacità di calcolare le basi
Questo potrebbe essere risolto in modo diverso con tre punti definiti nel database e trattarli come se fossero uno strumento esterno.
Dopo aver calcolato lo strumento, calcoliamo il punto su qualsiasi punto della base da calcolare e le coordinate cartesiane risultanti sarebbero quel particolare punto.
In sintesi
Il sistema VKRC2 è più veloce da programmare, ma perde efficacia per le applicazioni che richiedono una programmazione specifica.
È un sistema creato per funzionare con uno standard definito che è tutto pronto
Il sistema KRC2 dà più gioco alla programmazione, tutte le possibilità sono aperte e questo è importante per strutture che differiscono molto l'una dall'altra.
In ogni caso, la programmazione in modalità esperto è esattamente la stessa con entrambi i sistemi e sia le caratteristiche di prestazione che la maneggevolezza ei risultati finali sono identici.
Questo è lo stesso robot con la possibilità di pianificare uno dei due modi:
VKRC2 più veloce.
KRC2 più versatile.
Applicazioni Robot
- Stampaggio
- Carico e scarico dei pezzi
- Lavorazione
- Manipolazione di parti
- Saldatura ad arco
- Saldatura a punti
- Pallettizzazione
- Saldatura laser Nd-Yag
- Incollaggio - Incollaggio adesivo
- Saldatura a punti
Informazioni sul robot:
- Carico massimo di robot: 150/180 / 210Kg.
- Portata massima: 2700/2900/3100 mm.
- Ripetibilità: 0,15-0,2 mm.
- Controller: versione software VKR C2 3.3.4
Velocità di movimento del robot:
- Asse 1: 105º/seg
- Asse 2: 110º/seg
- Asse 3: 95º/seg
- Asse 4: 170º/seg
- Asse 5: 170º/seg
- Asse 6: 238º/seg
Applicazioni robot:
- Lavorazione a macchina
- Asservimento Macchine Utensili
- Lucidatura, levigatura e sbavatura
- Rivestimento e incollaggio
- Maneggio
- Misurazione e test
- Montaggio
- Pallettizzazione e commissionamento
- Taglio
- Saldatura



{kind=link}
{kind=link}
{kind=link}